Mostrando entradas con la etiqueta informacion. Mostrar todas las entradas
Mostrando entradas con la etiqueta informacion. Mostrar todas las entradas
domingo, 22 de marzo de 2009
Proyecto en espera...
Como el proyecto es mi tesis para graudarme de ingeniero, y por motivo de las pasantias que las realizé entre diciembre y febrero, el proyecto fue pausado, por falta de tiempo y recursos, ya que hay piezas que se encuetnran fuera del pais y no las he podido adquirir, pero dependiendo de lo que se salga lo termianre en forma de tesis o si no quedara como un proyecto personal.... gracias a todos por su espera y apoyo...
viernes, 24 de octubre de 2008
Tu Granito de Arena...
Como estan amig@s este espacio esta hecho para que me puedan dejar alguna idea general, links donde pueda conseguir mas informacion para la realizacion de mi tesis, como ven este sitio servira para documentar los pasos y opciones en la realizacion de mi tesis y me servira para mantener el orden para la realizacion de la misma.
Tambien lo hago con el fin de aceptar sugerencias e ideas por partes de ustedes, paginas donde pueda conseguir informacion adicional a la que tengo y links adicionales a los que aparece en el, y tambien ver si tendria el apoyo de ustedes en caso que necesite alguna ayuda con alguna programacion adicional, ya sea en Visual Basic, en lenguaje C, Asambler para pic, Gambas (equivalente a visualbasic en linux), realizacion de drivers en linux, entre otras ideas de como se podria armar el robot de una forma mas facil, a parte de lo que ya propuse, tal vez si ustedes no saben o no tienen tiempo y conocen de alguna persona que me pueda hechar una mano pasenle el link que de veras seran agradecidos por mi parte...
Yo soy de venezuela especificamente del Estado Bolivar, ¿sera que los que entren de aqui me podrian brinda una mano de donde puedo ubicar las piezas para la construccion de las mismas?
Por favor haganmela llegar por este medio...
domingo, 31 de agosto de 2008
Servomotores
En wikipedia podemos encontrar la definicion de un servomotor, pero de todas maneras aqui les hablare un poco sobre el servomotor...
Un servomotor (también llamado Servo) es un dispositivo similar a un motor de corriente continua, que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación y mantenerse estable en dicha posición. Está conformado por un motor, una caja reductora y un circuito de control. Los servos se utilizan frecuentemente en sistemas de radiocontrol y en robótica, pero su uso no está limitado a estos.
Servo analógico para modalismo
Estos servomotores se componen, en esencia, de un motor de corriente continua, un juego de engranajes para la reducción de velocidad, un potenciómetro ubicado sobre el eje de salida (que se usa para conocer la posición) y una plaqueta de circuito para el control.
 Despiese de un servomotor
Despiese de un servomotor
Los servos que se usan en modelismo son de este tipo. Como se dijo anteriormente, por lo general poseen un motor de CC, que gira a velocidad alta, una serie de engranajes para producir la reducción de velocidad de giro y acrecentar su capacidad de torque, un potenciómetro conectado al eje de salida (que es ni más ni menos que el encoder) y un circuito de control de la realimentación.
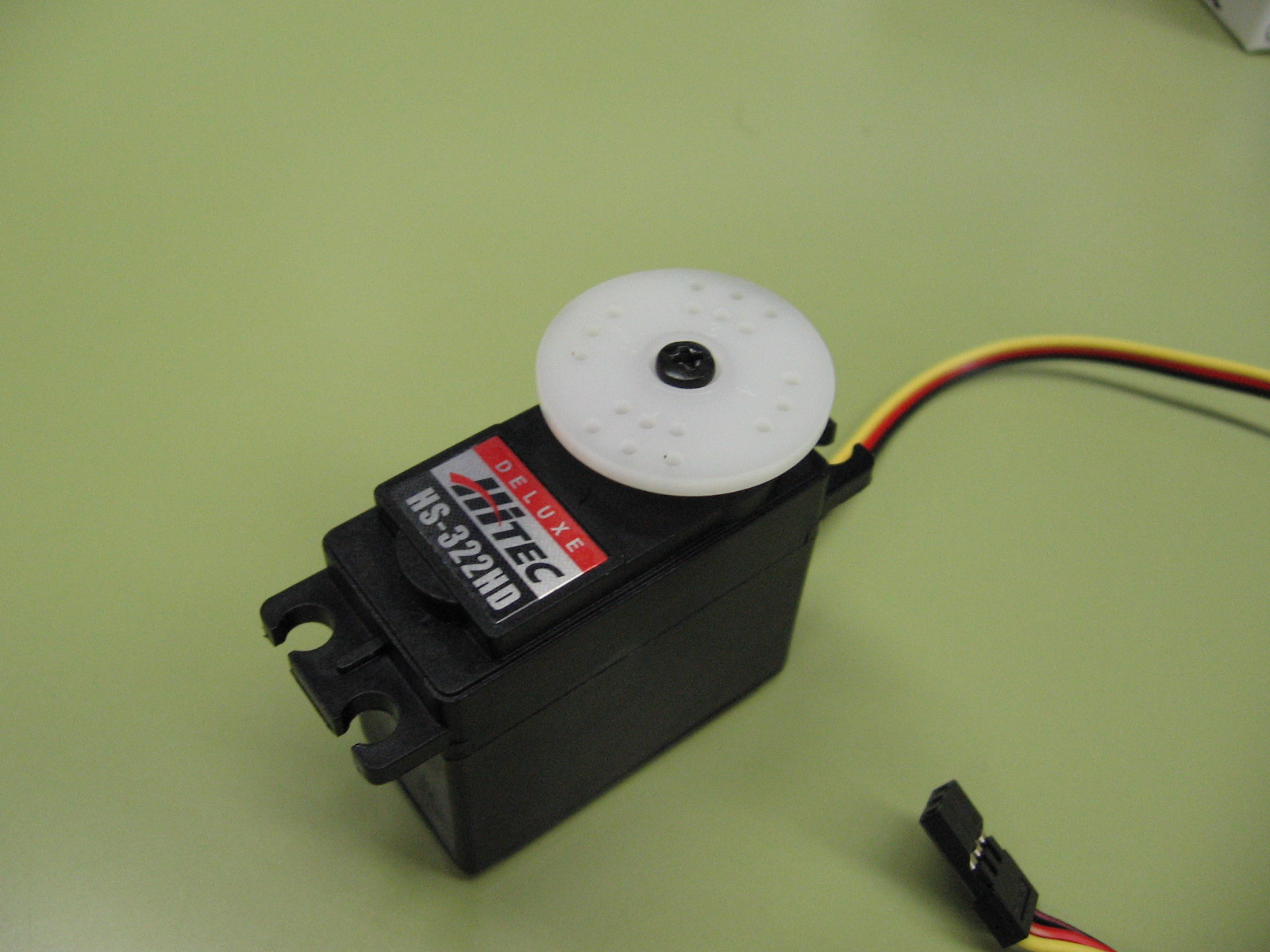
Estos servos reciben señal por tres cables: alimentación para el motor y la pequeña plaqueta de circuito del control (a través de dos cables, positivo y negativo/masa), y una señal controladora que determina la posición que se requiere. La alimentación de estos servos es, normalmente, de entre 4,8 y 6 voltios.
El estándar de esta señal controladora para todos los servos de este tipo, elegido para facilitar el uso en radiocontrol, es un pulso de onda cuadrada de 1,5 milisegudos que se repite a un ritmo de entre 10 a 22 ms. Mientras el pulso se mantenga en ese ancho, el servo se ubicará en la posición central de su recorrido. Si el ancho de pulso disminuye, el servo se mueve de manera proporcional hacia un lado. Si el ancho de pulso aumenta, el servo gira hacia el otro lado. Generalmente el rango de giro de un servo de éstos cubre entre 90° y 180° de la circunferencia total, o un poco más, según la marca y modelo.
Es posible modificar un servo motor para eliminar su restricción de giro y permitirle dar giros completos. Esto, sin embargo, convierte al servo motor en un motor de corriente continua normal, pues es necesario eliminar el circuito de control. Debido que los engranajes reductores se conservan luego de la modificación, el motor obtenido mantiene la fuerza y velocidad que tenían servo inicial. Además, poseen la ventaja de que tienen menos inercia que los motores de corriente continua comerciales, lo que los hace útiles para ciertas aplicaciones.
Servo analógico para modalismo
Estos servomotores se componen, en esencia, de un motor de corriente continua, un juego de engranajes para la reducción de velocidad, un potenciómetro ubicado sobre el eje de salida (que se usa para conocer la posición) y una plaqueta de circuito para el control.
 Despiese de un servomotor
Despiese de un servomotorLos servos que se usan en modelismo son de este tipo. Como se dijo anteriormente, por lo general poseen un motor de CC, que gira a velocidad alta, una serie de engranajes para producir la reducción de velocidad de giro y acrecentar su capacidad de torque, un potenciómetro conectado al eje de salida (que es ni más ni menos que el encoder) y un circuito de control de la realimentación.
Estos servos reciben señal por tres cables: alimentación para el motor y la pequeña plaqueta de circuito del control (a través de dos cables, positivo y negativo/masa), y una señal controladora que determina la posición que se requiere. La alimentación de estos servos es, normalmente, de entre 4,8 y 6 voltios.
El estándar de esta señal controladora para todos los servos de este tipo, elegido para facilitar el uso en radiocontrol, es un pulso de onda cuadrada de 1,5 milisegudos que se repite a un ritmo de entre 10 a 22 ms. Mientras el pulso se mantenga en ese ancho, el servo se ubicará en la posición central de su recorrido. Si el ancho de pulso disminuye, el servo se mueve de manera proporcional hacia un lado. Si el ancho de pulso aumenta, el servo gira hacia el otro lado. Generalmente el rango de giro de un servo de éstos cubre entre 90° y 180° de la circunferencia total, o un poco más, según la marca y modelo.
Es posible modificar un servo motor para eliminar su restricción de giro y permitirle dar giros completos. Esto, sin embargo, convierte al servo motor en un motor de corriente continua normal, pues es necesario eliminar el circuito de control. Debido que los engranajes reductores se conservan luego de la modificación, el motor obtenido mantiene la fuerza y velocidad que tenían servo inicial. Además, poseen la ventaja de que tienen menos inercia que los motores de corriente continua comerciales, lo que los hace útiles para ciertas aplicaciones.
Suscribirse a:
Entradas (Atom)




