Aqui les dejo un video sobre lo que me entrevistó el Nueva Prensa, no se escucha muy bien, estos videos son sin edicion. sin mas preambulos...
Para verlos directamente de Youtube
Parte 1

 El sistema de suspension de lejos
El sistema de suspension de lejos Sistema de suspencion visto mas cerca
Sistema de suspencion visto mas cerca
 Marcamos y pegamos el modelo en papel al acrilico de 6mm
Marcamos y pegamos el modelo en papel al acrilico de 6mm Realizamos el corte que necesitamos y marcamos los puntos medios de la circunferencias para taladrar con mecha de madera, para asi evitar que se rompa, eso nos ocurrio en el acrilico que ven en la foto
Realizamos el corte que necesitamos y marcamos los puntos medios de la circunferencias para taladrar con mecha de madera, para asi evitar que se rompa, eso nos ocurrio en el acrilico que ven en la foto Abrimos los de la primera cara
Abrimos los de la primera cara Aqui estamos haciendo la media luna del sistema de suspencion, despues de realizar las media lunas, entre la mecha y la fresa, se utilizaron las limas para limpiar algun mal corte hecho por la mecha y la fresa
Aqui estamos haciendo la media luna del sistema de suspencion, despues de realizar las media lunas, entre la mecha y la fresa, se utilizaron las limas para limpiar algun mal corte hecho por la mecha y la fresa Realizando el acabado estetico
Realizando el acabado estetico Aqui esta la 3 pieza...
Aqui esta la 3 pieza... Aqui esta la 4 pieza :D
Aqui esta la 4 pieza :D aqui se esta realizando la base en donde ira montado todo
aqui se esta realizando la base en donde ira montado todo un lado finalizado
un lado finalizado al finalizar se cortaron los tornillos con el esmeril para que no estorbaran luego
al finalizar se cortaron los tornillos con el esmeril para que no estorbaran luego aqui se puede ver el resultado de los dos lados listo, lo blanco es el pegamento "2 toneladas"
aqui se puede ver el resultado de los dos lados listo, lo blanco es el pegamento "2 toneladas" aqui se puede apreciar la limpieza que el estamos realizando a los bordes para evitar cortadura y estorbo de los escombros que queda al cortar el angulo de aluminio
aqui se puede apreciar la limpieza que el estamos realizando a los bordes para evitar cortadura y estorbo de los escombros que queda al cortar el angulo de aluminio aqui ya esta realizado, solo hay que dejar secar la pega y pintarlo
aqui ya esta realizado, solo hay que dejar secar la pega y pintarlo aqui se aprecia el cuerpo ya pintado de un color metalizado
aqui se aprecia el cuerpo ya pintado de un color metalizado




 En la imagen anterior se puede observar que al darle a la camara abre el programa bloc de notas, este es provisional hasta tener la camara se haria el llamado del programa de la camara.
En la imagen anterior se puede observar que al darle a la camara abre el programa bloc de notas, este es provisional hasta tener la camara se haria el llamado del programa de la camara.

Yo soy de venezuela especificamente del Estado Bolivar, ¿sera que los que entren de aqui me podrian brinda una mano de donde puedo ubicar las piezas para la construccion de las mismas?
Por favor haganmela llegar por este medio...
 La foto que vemos arriba es la vista lateral del tanque, como ven esta todo desarmado incluso el sistema de suspension esta desarmado
La foto que vemos arriba es la vista lateral del tanque, como ven esta todo desarmado incluso el sistema de suspension esta desarmado
 aqui vemos el sistema de traccion y control general del tanque, este sistema es como el que les mostre en la publicacion anterior, este tanque podria aguantar hasta 4 kilos y mantener una buena maniobrabilidad...
aqui vemos el sistema de traccion y control general del tanque, este sistema es como el que les mostre en la publicacion anterior, este tanque podria aguantar hasta 4 kilos y mantener una buena maniobrabilidad...
 En estas dos ultiams fotos apreciamos el sistema de traccion mucho mejor...
En estas dos ultiams fotos apreciamos el sistema de traccion mucho mejor...
Eléctricamente, el puerto paralelo entrega señales TTL y como tal, teoricamente, se le puede conectar cualquier dispositivo que cumpla con los niveles de voltaje específicos de la lógica TTL, sin embargo el hardware del puerto paralelo está muy limitado en cuanto a su capacidad de manejo de corriente, por ésta razón se debe ser muy cuidadoso con el manejo de las señales del puerto, un corto circuito puede dañar permanentemente la tarjeta madre de la PC. Para disminuir lo más posible el riesgo de daños al puerto utilizamos un circuito integrado 74LS244 como etapa separadora y al mismo tiempo mejoramos la capacidad de manejo de corriente, de esta forma podemos conectar una serie de diodos emisores de luz (LED) que nos indiquen la actividad en las líneas de datos del puerto paralelo. El circuito se detalla en el siguiente diagrama:

Por cada línea de entrada que tomamos directamente del puerto paralelo existe una etapa amplificadora-separadora dentro del circuito integrado 74LS244 que nos permite trabajar con una tasa de entrega de corriente suficiente para desplegar en los diodos emisores de luz la información escrita en las líneas de datos del puerto. Además es posible habilitar ó deshabilitar el despliegue del nibble de orden inferior ó superior del byte escrito en el puerto. Colocando en un nivel lógico alto la patita 1 del CI 74LS244 inhabilitamos el despliegue del nibble de orden bajo, un nivel lógico alto en la patita 19 evita el despliegue del nibble de orden alto. Para comodidad, conecto las patitas 1 y 19 permanentemente a tierra de tal manera que sea posible visualizar la actividad en los diodos emisores de luz (LED). En el diagrama se especifican con números las correspondientes patitas del conector DB-25. Obviamente se requiere de una fuente regulada de 5 Voltios para operar éste circuito, además los siguientes materiales:
Naturalmente lo más recomendable es probar el correcto funcionamiento del circuito antes de conectarlo al puerto paralelo de la PC. Ensamble el circuito, preferentemente en un circuito impreso, y conéctelo a una fuente regulada de 5 Voltios, conecte temporalmente un extremo de una resistencia de 10,000 Ohms a una línea de entrada, el resto de las líneas de entrada conéctelas a tierra. El otro extremo de la resistencia conéctelo directamente al borne positivo de la fuente de alimentación para inducir una señal TTL alta, el respectivo LED debe encender. Con un trozo de alambre conectado a Tierra, toque temporalemente el extremo de la resistencia que está conectado a la línea de entrada para inducir una señal TTL de lógica baja, el LED se debe apagar. Repita ésta operación para cada una de las ocho líneas de entrada. Una vez que ha verificado el correcto funcionamiento del circuito está listo para conectarlo al puerto paralelo de la PC.
En primer lugar apague la computadora y el circuito. Conecte el cable al puerto paralelo asegurándose que el conector esté firme en su sitio. Encienda el circuito y por último encienda la computadora, por regla general, el circuito de restablecimiento de la computadora coloca inicialmente en las líneas de datos del puerto paralelo un valor igual a 0x0h, por lo tanto todos los diodos deben estar apagados una vez que la computadora ha terminado su proceso de arranque, sin embargo, si algún diodo permanece encendido ésto no indica una condición de falla, es responsabilidad del software que Usted escriba para controlar el puerto inicializarlo con un valor adecuado antes de realizar cualquier otra operación.
Mas informacion en la pagina del autor






Tarde o temprano, todo aficionado a la robótica decide utilizar un servo como si fuese un motor dotado de una caja reductora. Esto es muy sencillo de lograr, aunque requiere tener bastante cuidado para no terminar con un servo inutilizado.
Para los que no saben de que hablamos, la idea es quitar las restricciones mecánicas y electrónicas que posee un servomotor para permitirle girar libremente, aunque conservando la posibilidad de ser comandado desde un microcontrolador.
Para que todos los lectores de uControl puedan llevar a buen puerto el "trucado" de sus servos, hemos escrito esta guía paso a paso, con muchas fotografías para ilustrar cada etapa del proceso.
pronto pasare la tutorial al blog para asi facilitarles el trabajo...
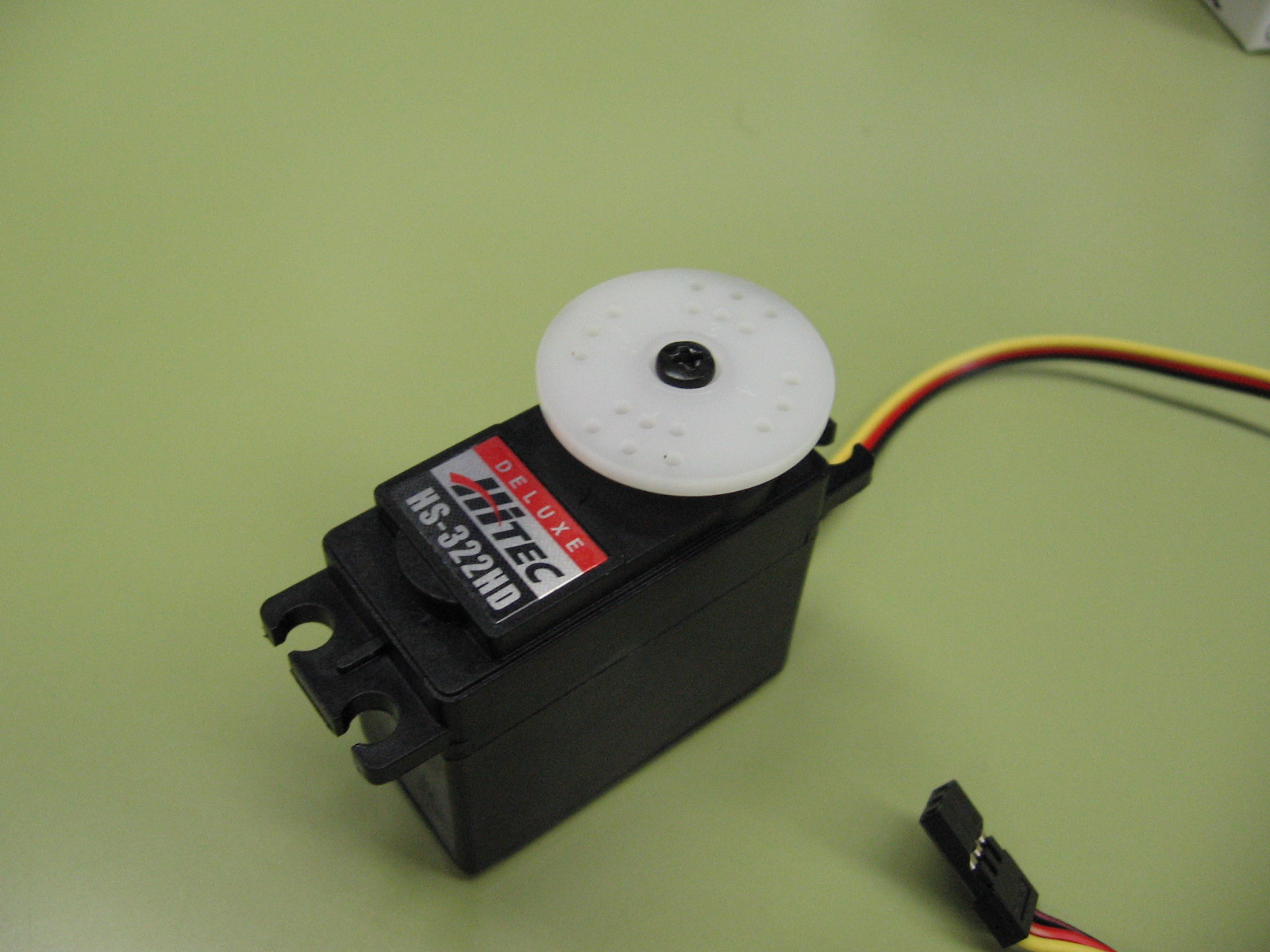
 Despiese de un servomotor
Despiese de un servomotorEn el circuito de abajo vemos un Puente H de transistores, nombre que surge, obviamente, de la posición de los transistores, en una distribución que recuerda la letra H. Esta configuración es una de las más utilizadas en el control de motores de CC, cuando es necesario que se pueda invertir el sentido de giro del motor.

Aplicando una señal positiva en la entrada marcada AVANCE se hace conducir al transistor Q1. La corriente de Q1 circula por las bases, de Q2 y Q5,haciendo que el terminal a del motor reciba un positivo y el terminal b el negativo (tierra).


Una de las cosas muy importantes que se deben tener en cuenta en el control de este circuito es que las señales AVANCE y RETROCESO jamás deben coincidir. Si esto ocurre los transistores, Q2, Q3, Q4 y Q5 cerrarán circuito directamente entre el positivo de la fuente de alimentacion y tierra, sin pasar por el motor, de modo que es seguro que se excederá la capacidad de corriente Emisor-Colector y los transistores, se dañarán para siempre. Y si la fuente no posee protección, también podrá sufrir importantes daños. Al efecto existen varias formas de asegurarse de esto, utilizando circuitos que impiden esta situación (llamados "de interlock"), generalmente digitales, basados en compuertas lógicas. Abajo mostramos un ejemplo.



Dentro de éstas se ubican los demás componentes como:
• Escobillas y porta escobillas
• Colector
• Eje
• Núcleo y devanado del rotor
• Imán Permanente
• Armazón
• Tapas o campanas










{kind=link}