Este blog esta diseñado con el fin de llevar una documentacion, de la forma en que se va armando un robot que podria ser usado para la reduccion de accidentes en una mina subterranea, aqui encontraremos algunas definiciones y paginas de interes referente a la elecronica y robotica, les presento a RAMSU Robot.
En las siguientes imagenes se podrá apreciar una molificación casi general del elevador tipo tijeras, ya que el la la barra roscada era muy delgada y se doblo en la mitad debido a la presión que se ejercía en el elevador, en la se sustituyó esa parte y la guia se uso un tubo de aluminio que es mas fuerte, se usaron resortes para aplicar tensión y aliviar la carga del motor al momento de que el elevador subiera. Al ir subiendo y bajando el elevador generaba mucho ruido y de por si fallas de aislamiento del motor, en las pruebas el engranaje que iba pegado al eje se le rompio un diente y poreso se decidio hacer el cambio, al final se podrá apreciar los dos videos de pruebas de las dos versiones del elevador, sin mas nada que agregar (por ahora) los dejo con las imagenes de la molificación.
se tuvo que comprar una broca para realizar la rosca de la nueva barra
realizando la rosca en el tubo
de arriba hascia abajo, 1- Barra roscada sin modificacion 2- barra roscada picada a la medida e intentando ajustarla manuelmente 3- se decidio por llevarlo a un tornero para un mejor acabado y que quedará mejor centrada
la barra roscada montado en su guia y con la respectiva guia del elevador
se compró una ventana tipo macuto, para aprovechar las platinas y la U que trae para armar el elevador
se poicaron y redondearon las platinas
el elevador casi listo
con el engranaje montado
guia del elevador
el elevador casi culminado
reduciendo el tamaño de la guia para que entre en la U
viendo que entre justo la guia por el riel.
Elvador tijera anterior ahi pueden escuchar el ruido que está generando al subir y bajar y entre otros problemas que ocurría.
En este video se aprecia la nueva forma del elevador, es mas silenciosa y trabaja perfectamente
Solo lo que falta es pintar y colocarle los topes electricos y porsupuesto automatizarlo. Eso será el proximo paso :D...
Aqui vemos el tanque que compre, lo tengo desarmado, y le tome fotos de las piezas, tengo que reforzar algunas partes, para evitar que de rompan al momento ir aramndo o exponiendo (ahi si me vuelvo loco jeje) aqui les dejo las piezas y explicare algunas...
La foto que vemos arriba es la vista lateral del tanque, como ven esta todo desarmado incluso el sistema de suspension esta desarmado
Aqui vemos el sistema motor del movimiento del cañon del tanque, con este sistema sencillo servira para hacer el movimiento de la cabeza de RAMSU
aqui vemos el sistema de traccion y control general del tanque, este sistema es como el que les mostre en la publicacion anterior, este tanque podria aguantar hasta 4 kilos y mantener una buena maniobrabilidad...
En estas dos ultiams fotos apreciamos el sistema de traccion mucho mejor...
Buenas como estan amigos, nuevamente estoy por aqui dejandoles el cuerpo del robot original como lo consegui en la calle, tuve que viajar a Maracay a buscar componentes y aproveche y entre a las jugueterias conocidas por alla, y consegui algo muy interesante para usarlo como el cuerpo de RAMSU, es una version de un tanque Aleman conocido como TIGER 1...
La historia de tanque es...
(no tiene nada que ver con el proyecto pero no esta de mas saberlo)
Originalmente desarrollado bajo el nombre de Pzkw VI Ausf. H tras una peticion del OKW (Alto Mando del Ejercito de Tierra) y del proyecto resultante surgieron el Elefant, el Sd. Kfz 181 Tiger I y posteriormente el Tiger II o Königstiger, el Jagdtiger (versión cazacarros con un cañon de 128 mm) y el Sturmtiger, un carro diseñado para el combate urbano equipado con un mortero de origen naval que disparaba un proyectil propulsado a cohete de 380 mm.
El Tiger I fue utilizado desde finales de 1942 hasta la rendición alemana en 1945. Ferdinand Porsche le dio su sobrenombre. El manual de entrenamiento de la tripulación, el Tigerfibel se convirtió en una pieza de coleccionista.
Lo que nos interesa aqui es la base y la traccion que en este caso es oruga... aqui les dejo una fotos del tanque, estas fotos las consegui en internet, cuando pueda subo las fotos del tanque que tengo...
Tiene un sistema de suspensión independiente amortiguado por muelles de barra de torsión, al igual que el tamaño completo del Tiger I. Esta combinada con pistas pre-ensamblados, que proporcionan una suave, excitante y realista maniobrabilidad, incluso en terreno áspero.
SISTEMA DE ENGRANAJES
Esta Fabricado con un ensamblado independiente de doble caja de cambios. Está alimentado por dos motores RS-380 y ha una relación de transmisión 36.98:1 . El alto par del motor permite que el sistema tenga una maniobra exelente con un peso de hasta 4100g
Video
Aqui les dejo un video de su funcionamiento, el tanque que compre no realiza todas las funciones, fijense en como se mueve el tanque y la rotacion donde esta hubicado el cañon, pero no al momento de disparar...
Pronto pondre imagenes y videos tomadas por mi sobre el tanque...
El motor de paso a paso es un dispositivo electromecánico que convierte una serie de impulsos eléctricos en desplazamientos angulares discretos, lo que significa es que es capaz de avanzar una serie de grados (paso) dependiendo de sus entradas de control. El motor paso a paso se comporta de la misma manera que un convertidor digital-analógico y puede ser gobernado por impulsos procedentes de sistemas lógicos.
Este motor presenta las ventajas de tener alta precisión y repetibilidad en cuanto al posicionamiento. Entre sus principales aplicaciones destacan como motor de frecuencia variable, motor de corriente continua sin escobillas, servomotores y motores controlados digitalmente.
Existen 3 tipos fundamentales de motores paso a paso: el motor de reluctancia variable, el motor de magnetización permanente, y el motor paso a paso híbrido.
El motor paso a paso está constituido, como la mayoría de motores eléctricos, esencialmente de dos partes:
Una parte fija llamada "estator", construida a base de cavidades en las que van depositadas las bobinas que excitadas convenientemente formarán los polos norte-sur de forma que se cree un campo magnético giratorio.
Una parte móvil, llamada "rotor" construida bien con un imán permanente o bien por un inducido ferromagnético, con el mismo número de pares de polos que el contenido en una sección de la bobina del estator; este conjunto va montado sobre un eje soportado por dos cojinetes que le permiten girar libremente.
Si por el medio del control que sea (electrónico, informático, etc.), conseguimos excitar el estator creando los polos N-S, y hacemos variar dicha excitación de modo que el campo magnético formado efectúe un movimiento giratorio, la respuesta del rotor será seguir el movimiento de dicho campo, produciéndose de este modo el giro del motor.
Estos motores poseen la habilidad de poder quedar enclavados en una posición o bien totalmente libres. Si una o más de sus bobinas están alimentadas, el motor estará enclavado en la posición correspondiente y por el contrario quedará completamente libre si no circula corriente por ninguna de sus bobinas.
En la Tabla de orden de fases (tabla 1), se puede observar en este caso concreto que el motor tendrá un paso angular de 90º y un semipaso de 45º esta segunda ocurre al excitarse más de una bobina.
Tabla de orden de fases. En este caso concreto el motor tendrá un paso angular de 90º y un semipaso de 45º
(al excitarse más de una bobina)
Paso
Terminal 1
Bobina A
Terminal 2
Bobina A
Terminal 1
Bobina B
Terminal 2 Bobina B
Imagen
Paso 1
+Vcc
-Vcc
(Semi)
Paso 2
+Vcc
-Vcc
+Vcc
-Vcc
Paso 3
+Vcc
-Vcc
(Semi)
Paso 4
-Vcc
+Vcc
+Vcc
-Vcc
Paso 5
-Vcc
+Vcc
(Semi)
Paso 6
-Vcc
+Vcc
-Vcc
+Vcc
Paso 7
-Vcc
+Vcc
(Semi)
Paso 8
+Vcc
-Vcc
-Vcc
+Vcc
Comportamiento propio de los motores paso a paso:
Los motores paso a paso tienen un comportamiento del todo diferente al de los motores de corriente continua. En primer lugar, no giran libremente por sí mismos. Los motores paso a paso, como lo indica su nombre, avanzan girando por pequeños pasos. También difieren de los motores de CC en la relación entre velocidad y torque (un parámetro que también es llamado "par motor" y "par de giro"). Los motores de CC no son buenos para ofrecer un buen torque a baja velocidad sin la ayuda de un mecanismo de reducción. Los motores paso a paso, en cambio, trabajan de manera opuesta: su mayor capacidad de torque se produce a baja velocidad.
Los motores paso a paso tienen una característica adicional: el torque de detención (que se puede ver mencionado también como "par de detención", e incluso par/torque "de mantenimiento"), que no existe en los motores de CC. El torque de detención hace que un motor paso a paso se mantenga firmemente en su posición cuando no está girando. Esta característica es muy útil cuando el motor deja de moverse y, mientras está detenido, la fuerza de carga permanece aplicada a su eje. Se elimina así la necesidad de un mecanismo de freno.
Si bien es cierto que los motores paso a paso funcionan controlados por un pulso de avance, el control de un motor paso a paso no se realiza aplicando en directo este pulso eléctrico que lo hace avanzar. Estos motores tienen varios bobinados que, para producir el avance de ese paso, deben ser alimentados en una adecuada secuencia. Si se invierte el orden de esta secuencia, se logra que el motor gire en sentido opuesto. Si los pulsos de alimentación no se proveen en el orden correcto, el motor no se moverá apropiadamente. Puede ser que zumbe y no se mueva, o puede ser que gire, pero de una manera tosca e irregular.
Esto significa que hacer girar un motor paso a paso no es tan simple como hacerlo con un motor de corriente continua, al que se le entrega una corriente y listo. Se requiere un circuito de control, que será el responsable de convertir las señales de avance de un paso y sentido de giro en la necesaria secuencia de energización de los bobinados.
Características comunes de los motores paso a paso:
Un motor paso a paso se define por estos parámetros básicos:
Voltaje
Los motores paso a paso tienen una tensión eléctrica de trabajo. Este valor viene impreso en su carcasa o por lo menos se especifica en su hoja de datos. Algunas veces puede ser necesario aplicar un voltaje superior para lograr que un determinado motor cumpla con el torque deseado, pero esto producirá un calentamiento excesivo y/o acortará la vida útil del motor.
Resistencia eléctrica
Otra característica de un motor paso a paso es la resistencia de los bobinados. Esta resistencia determinará la corriente que consumirá el motor, y su valor afecta la curva de torque del motor y su velocidad máxima de operación.
Grados por paso
Generalmente, este es el factor más importante al elegir un motor paso a paso para un uso determinado. Este factor define la cantidad de grados que rotará el eje para cada paso completo. Una operación de medio-paso o semi-paso (half step) del motor duplicará la cantidad de pasos por revolución al reducir la cantidad de grados por paso. Cuando el valor de grados por paso no está indicado en el motor, es posible contar a mano la cantidad de pasos por vuelta, haciendo girar el motor y sintiendo por el tacto cada "diente" magnético. Los grados por paso se calculan dividiendo 360 (una vuelta completa) por la cantidad de pasos que se contaron. Las cantidades más comunes de grados por paso son: 0,72°, 1,8°, 3,6°, 7,5°, 15° y hasta 90°. A este valor de grados por paso usualmente se le llama la resolución del motor. En el caso de que un motor no indique los grados por paso en su carcasa, pero sí la cantidad de pasos por revolución, al dividir 360 por ese valor se obtiene la cantidad de grados por paso. Un motor de 200 pasos por vuelta, por ejemplo, tendrá una resolución de 1,8° por paso.
Tipos de motores paso a paso
El motor de paso de rotor de imán permanente: Permite mantener un par diferente de cero cuando el motor no está energizado. Dependiendo de la construcción del motor, es típicamente posible obtener pasos angulares de 7.5, 11.25, 15, 18, 45 o 90°. El ángulo de rotación se determina por el número de polos en el estator.
El motor de paso de reluctancia variable (VR): Tiene un rotor multipolar de hierro y un estator devanado laminado, y rota cuando los dientes del rotor son atraídos a los dientes del estator electromagnéticamente energizados. La inercia del rotor de un motor de paso de reluctancia variable es pequeña y la respuesta es muy rápida, pero la inercia permitida de la carga es pequeña. Cuando los devanados no están energizados, el par estático de este tipo de motor es cero. Generalmente, el paso angular de este motor de paso de reluctancia variable es de 15°.
El motor híbrido de paso: Se caracteriza por tener varios dientes en el estator y en el rotor, el rotor con un imán concéntrico magnetizado axialmente alrededor de su eje. Se puede ver que esta configuración es una mezcla de los tipos de reluctancia variable e imán permanente. Este tipo de motor tiene una alta precisión y alto par y se puede configurar para suministrar un paso angular tan pequeño como 1.8°.
Velocidad de rotación
La velocidad de rotación viene definida por la ecuación:
donde:
f: frecuencia del tren de impulsos
n: nº de polos que forman el motor
Si bien hay que decir que para estos motores, la máxima frecuencia admisible suele estar alrededor de los 625 Hz. Si la frecuencia de pulsos es demasiado elevada, el motor puede reaccionar erróneamente en alguna de las siguientes maneras:
Puede que no realice ningún movimiento en absoluto.
Puede comenzar a vibrar pero sin llegar a girar.
Puede girar erráticamente.
O puede llegar a girar en sentido opuesto.
Para mas informacion ver el siguiente enlace: Motores PaP
En wikipedia podemos encontrar la definicion de un servomotor, pero de todas maneras aqui les hablare un poco sobre el servomotor...
Un servomotor (también llamado Servo) es un dispositivo similar a un motor de corriente continua, que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación y mantenerse estable en dicha posición. Está conformado por un motor, una caja reductora y un circuito de control. Los servos se utilizan frecuentemente en sistemas de radiocontrol y en robótica, pero su uso no está limitado a estos.
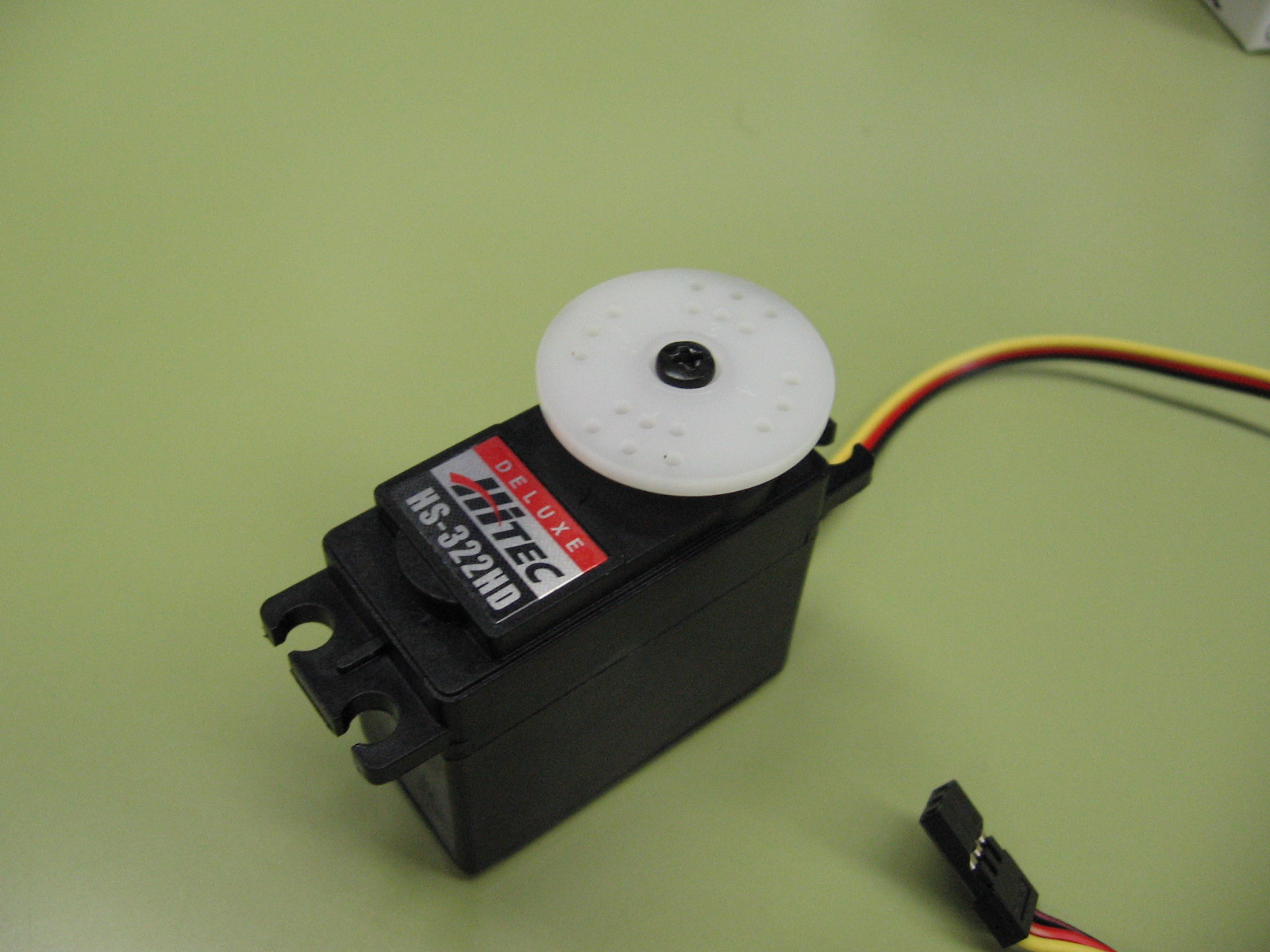
Servo analógico para modalismo
Estos servomotores se componen, en esencia, de un motor de corriente continua, un juego de engranajes para la reducción de velocidad, un potenciómetro ubicado sobre el eje de salida (que se usa para conocer la posición) y una plaqueta de circuito para el control.
Despiese de un servomotor
Los servos que se usan en modelismo son de este tipo. Como se dijo anteriormente, por lo general poseen un motor de CC, que gira a velocidad alta, una serie de engranajes para producir la reducción de velocidad de giro y acrecentar su capacidad de torque, un potenciómetro conectado al eje de salida (que es ni más ni menos que el encoder) y un circuito de control de la realimentación.
Estos servos reciben señal por tres cables: alimentación para el motor y la pequeña plaqueta de circuito del control (a través de dos cables, positivo y negativo/masa), y una señal controladora que determina la posición que se requiere. La alimentación de estos servos es, normalmente, de entre 4,8 y 6 voltios.
El estándar de esta señal controladora para todos los servos de este tipo, elegido para facilitar el uso en radiocontrol, es un pulso de onda cuadrada de 1,5 milisegudos que se repite a un ritmo de entre 10 a 22 ms. Mientras el pulso se mantenga en ese ancho, el servo se ubicará en la posición central de su recorrido. Si el ancho de pulso disminuye, el servo se mueve de manera proporcional hacia un lado. Si el ancho de pulso aumenta, el servo gira hacia el otro lado. Generalmente el rango de giro de un servo de éstos cubre entre 90° y 180° de la circunferencia total, o un poco más, según la marca y modelo.
Es posible modificar un servo motor para eliminar su restricción de giro y permitirle dar giros completos. Esto, sin embargo, convierte al servo motor en un motor de corriente continua normal, pues es necesario eliminar el circuito de control. Debido que los engranajes reductores se conservan luego de la modificación, el motor obtenido mantiene la fuerza y velocidad que tenían servo inicial. Además, poseen la ventaja de que tienen menos inercia que los motores de corriente continua comerciales, lo que los hace útiles para ciertas aplicaciones.
Control de motores de CC Puente H por Eduardo J. Carletti de la pagina http://robots-argentina.com.ar
En el circuito de abajo vemos un Puente H de transistores, nombre que surge, obviamente, de la posición de los transistores, en una distribución que recuerda la letra H. Esta configuración es una de las más utilizadas en el control de motores de CC, cuando es necesario que se pueda invertir el sentido de giro del motor.
Aplicando una señal positiva en la entrada marcada AVANCE se hace conducir al transistor Q1. La corriente de Q1 circula por las bases, de Q2 y Q5,haciendo que el terminal a del motor reciba un positivo y el terminal b el negativo (tierra).
Si en cambio se aplica señal en la entrada RETROCESO, se hace conducir al transistor Q6, que cierra su corriente por las bases, de Q4 y Q3. En este caso se aplica el positivo al terminal b del motor y el negativo (tierra) al terminal a del motor.
Una de las cosas muy importantes que se deben tener en cuenta en el control de este circuito es que las señales AVANCE y RETROCESO jamás deben coincidir. Si esto ocurre los transistores, Q2, Q3, Q4 y Q5 cerrarán circuito directamente entre el positivo de la fuente de alimentacion y tierra, sin pasar por el motor, de modo que es seguro que se excederá la capacidad de corriente Emisor-Colector y los transistores, se dañarán para siempre. Y si la fuente no posee protección, también podrá sufrir importantes daños. Al efecto existen varias formas de asegurarse de esto, utilizando circuitos que impiden esta situación (llamados "de interlock"), generalmente digitales, basados en compuertas lógicas. Abajo mostramos un ejemplo.
He aquí otra opción de Puente H y circuito de Interlock, con la ventaja de que utiliza menos transistores (tipo Darlington en este caso) y de tener un circuito de interlock aún más seguro. En el circuito anterior, si se presentan las dos señales activas simultáneamente se habilita uno de los sentidos de marcha, sin que se pueda prever cuál será. Si las señales llegan con una leve diferencia de tiempo, se habilita la orden que ha llegado primero, pero si ambas señales llegan al mismo tiempo no se puede prever cuál comando (AVANCE o RETROCESO) será habilitado. En este segundo circuito no se habilita ninguno:
El circuito Puente H sólo permite un funcionamiento SÍ-NO del motor, a plena potencia en un sentido o en el otro (además del estado de detención, por supuesto), pero no ofrece un modo de controlar la velocidad. Si es necesario hacerlo, se puede apelar a la regulación del voltaje de la fuente de alimentación, variando su potencial de 7,2 V hacia abajo para reducir la velocidad. Esta variación de tensión de fuente produce la necesaria variación de corriente en el motor y, por consiguiente, de su velocidad de giro. Es una solución que puede funcionar en muchos casos, pero se trata de una regulación primitiva, que podría no funcionar en aquellas situaciones en las que el motor está sujeto a variaciones de carga mecánica, es decir que debe moverse aplicando fuerzas diferentes. En este caso es muy difícillograr la velocidad deseada cambiando la corriente que circula por el motor, ya que ésta también será función —además de serlo de la tensión eléctrica de la fuente de alimentación— de la carga mecánica que se le aplica (es decir, de la fuerza que debe hacer para girar).
Una de las maneras de lograr un control de la velocidad es tener algún tipo de realimentación, es decir, algún artefacto que permita medir a qué velocidad está girando el motor y entonces, en base a lo medido, regular la corriente en más o en menos. Este tipo de circuito requiere algún artefacto de senseo (sensor) montado sobre el eje del motor. A este elemento se le llama tacómetro y suele ser un generador CC (otro motor de CC cumple perfectamente la función, aunque podrá ser uno de mucho menor potencia), un sistema de tacómetro digital óptico, con un disco de ranuras o bandas blancas y negras montado sobre el eje, u otros sistemas, como los de pickups mágneticos.
Existe una solución menos mecánica y más electrónica, que es, en lugar de aplicar una corriente continua, producir un corte de la señal en pulsos, a los que se les regula el ancho. Este sistema se llama control porRegulación de Ancho de Pulso (PWM, Pulse-Width-Modulated, en inglés).
Solo colocare en este blog la info que necesitare y usare para armar este robot, si quieren complementar usen los links de intereses que les deje y google XD...
El motor de corriente continua (CC) es una máquina que convierte la energía eléctrica en mecánica, principalmente mediante el movimiento rotatorio. En la actualidad existen nuevas aplicaciones con motores eléctricos que no producen movimiento rotatorio, sino que con algunas modificaciones, ejercen tracción sobre un riel. Estos motores se conocen como motores lineales.
Son de los más comunes y económicos, y puedes encontrarlo en la mayoría de los juguetes a pilas, constituidos, por lo general, por dos imanes permanentes fijados en la carcaza y una serie de bobinados de cobre ubicados en el eje del motor, que habitualmente suelen ser tres.
El motor de corriente continua está compuesto de 2 piezas fundamentales, rotor y el estator.
Dentro de éstas se ubican los demás componentes como:
• Escobillas y porta escobillas
• Colector
• Eje
• Núcleo y devanado del rotor
• Imán Permanente
• Armazón
• Tapas o campanas
El rotor constituye la parte móvil del motor, proporciona el torque para mover a la carga.
Está formado por:
Eje: Formado por una barra de acero fresada. Imparte la rotación al núcleo, devanado y al colector.
Núcleo: Se localiza sobre el eje. Fabricado con capas laminadas de acero, su función es proporcionar un trayecto magnético entre los polos para que el flujo magnético del devanado circule.
Las laminaciones tienen por objeto reducir las corrientes parásitas en el núcleo. El acero del núcleo debe ser capaz de mantener bajas las pérdidas por histéresis. Este núcleo laminado contiene ranuras a lo largo de su superficie para albergar al devanado de la armadura (bobinado).
Devanado: Consta de bobinas aisladas entre sí y entre el núcleo de la armadura. Estas bobinas están alojadas en las ranuras, y están conectadas eléctricamente con el colector, el cual debido a su movimiento rotatorio, proporciona un camino de conducción conmutado.
Colector: Denominado también conmutador, está constituido de láminas de material conductor (delgas), separadas entre sí y del centro del eje por un material aislante, para evitar cortocircuito con dichos elementos. El colector se encuentra sobre uno de los extremos del eje del rotor, de modo que gira con éste y está en contacto con las escobillas. La función del colector es recoger la tensión producida por el devanado inducido, transmitiéndola al circuito por medio de las escobillas (llamadas también cepillos).
El Estator constituye la parte fija de la máquina. Su función es suministrar el flujo magnético que será usado por el bobinado del rotor para realizar su movimiento giratorio.
Está formado por:
Armazón: Denominado también yugo, tiene dos funciones primordiales: servir como soporte y proporcionar una trayectoria de retorno al flujo magnético del rotor y del imán permanente, para completar el circuito magnético.
Imán permanente: Compuesto de material ferromagnético altamente remanente, se encuentra fijado al armazón o carcaza del estator. Su función es proporcionar un campo magnético uniforme al devanado del rotor o armadura, de modo que interactúe con el campo formado por el bobinado, y se origine el movimiento del rotor como resultado de la interacción de estos campos.
Escobillas: Las escobillas están fabricadas se carbón, y poseen una dureza menor que la del colector, para evitar que éste se desgaste rápidamente. Se encuentran albergadas por los portaescobillas. Ambos, escobillas y portaescobillas, se encuentran en una de las tapas del estator.
La función de las escobillas es transmitir la tensión y corriente de la fuente de alimentación hacia el colector y, por consiguiente, al bobinado del rotor.
La función del portaescobillas es mantener a las escobillas en su posición de contacto firme con los segmentos del colector. Esta función la realiza por medio de resortes, los cuales hacen una presión moderada sobre las escobillas contra el colector. Esta presión debe mantenerse en un nivel intermedio pues, de ser excesiva, la fricción desgastaría tanto a las escobillas como al colector; por otro lado, de ser mínima esta presión, se produciría lo que se denomina "chisporroteo", que es cuando aparecen chispas entre las superficies del colector y las escobillas, debido a que no existe un buen contacto.
Para invertir los giros de los motores de corriente continua se puede utilizar una fuente simétrica o dos fuentes de alimentación con un interruptor simple de dos contactos y otra es utilizar una fuente común con un interruptor doble es decir uno de 4 contactos.
EL motivo el cual llame a este proyecto RAMSU Robot, es por las iniciales el cual quieren decir "Reducción de Accidentes en las Minas SUbterráneas"
Mi motivación para realizar este proyecto es que han estado ocurriendo muchos accidentes, al momento de realizar una inspección a una mina subterránea, con la implementación de un robot ayudaría a mejorar el ambiente de trabajo en las minas subterráneas, de una manera tal que los trabajadores, laboraran con mayor confianza porque tendrán un nivel de seguridad mas optimizado que el actual, pues las revisiones se pueden realizar a distancia y las veces que sea requerida por la facilidad que tendrá el minero encargado de la seguridad para realizar esta operación y también por la seguridad porque no correrá peligro de que quede dentro de la mina o tenga un accidente porque el estará a una distancia segura.
 se tuvo que comprar una broca para realizar la rosca de la nueva barra
se tuvo que comprar una broca para realizar la rosca de la nueva barra realizando la rosca en el tubo
realizando la rosca en el tubo

 la barra roscada montado en su guia y con la respectiva guia del elevador
la barra roscada montado en su guia y con la respectiva guia del elevador se compró una ventana tipo macuto, para aprovechar las platinas y la U que trae para armar el elevador
se compró una ventana tipo macuto, para aprovechar las platinas y la U que trae para armar el elevador se poicaron y redondearon las platinas
se poicaron y redondearon las platinas el elevador casi listo
el elevador casi listo con el engranaje montado
con el engranaje montado guia del elevador
guia del elevador el elevador casi culminado
el elevador casi culminado reduciendo el tamaño de la guia para que entre en la U
reduciendo el tamaño de la guia para que entre en la U
 viendo que entre justo la guia por el riel.
viendo que entre justo la guia por el riel.


































{kind=link}