martes, 4 de noviembre de 2008
Probando...
martes, 28 de octubre de 2008
Montaje preeliminar del sistema de mando de RAMSU

viernes, 24 de octubre de 2008
Tu Granito de Arena...
Yo soy de venezuela especificamente del Estado Bolivar, ¿sera que los que entren de aqui me podrian brinda una mano de donde puedo ubicar las piezas para la construccion de las mismas?
Por favor haganmela llegar por este medio...
Fotos del tanque que compre
 La foto que vemos arriba es la vista lateral del tanque, como ven esta todo desarmado incluso el sistema de suspension esta desarmado
La foto que vemos arriba es la vista lateral del tanque, como ven esta todo desarmado incluso el sistema de suspension esta desarmado
 aqui vemos el sistema de traccion y control general del tanque, este sistema es como el que les mostre en la publicacion anterior, este tanque podria aguantar hasta 4 kilos y mantener una buena maniobrabilidad...
aqui vemos el sistema de traccion y control general del tanque, este sistema es como el que les mostre en la publicacion anterior, este tanque podria aguantar hasta 4 kilos y mantener una buena maniobrabilidad...
 En estas dos ultiams fotos apreciamos el sistema de traccion mucho mejor...
En estas dos ultiams fotos apreciamos el sistema de traccion mucho mejor...martes, 21 de octubre de 2008
Cuerpo del Robot y Orugas

La historia de tanque es...
(no tiene nada que ver con el proyecto pero no esta de mas saberlo)
Originalmente desarrollado bajo el nombre de Pzkw VI Ausf. H tras una peticion del OKW (Alto Mando del Ejercito de Tierra) y del proyecto resultante surgieron el Elefant, el Sd. Kfz 181 Tiger I y posteriormente el Tiger II o Königstiger, el Jagdtiger (versión cazacarros con un cañon de 128 mm) y el Sturmtiger, un carro diseñado para el combate urbano equipado con un mortero de origen naval que disparaba un proyectil propulsado a cohete de 380 mm.
El Tiger I fue utilizado desde finales de 1942 hasta la rendición alemana en 1945. Ferdinand Porsche le dio su sobrenombre. El manual de entrenamiento de la tripulación, el Tigerfibel se convirtió en una pieza de coleccionista.
Para mas info visita WIKIPEDIA
Lo que nos interesa aqui es la base y la traccion que en este caso es oruga... aqui les dejo una fotos del tanque, estas fotos las consegui en internet, cuando pueda subo las fotos del tanque que tengo...
aqui les dejo las imagenes tomadas de esta pagina

SUSPENCION

Tiene un sistema de suspensión independiente amortiguado por muelles de barra de torsión, al igual que el tamaño completo del Tiger I. Esta combinada con pistas pre-ensamblados, que proporcionan una suave, excitante y realista maniobrabilidad, incluso en terreno áspero.

Esta Fabricado con un ensamblado independiente de doble caja de cambios. Está alimentado por dos motores RS-380 y ha una relación de transmisión 36.98:1 . El alto par del motor permite que el sistema tenga una maniobra exelente con un peso de hasta 4100g
Aqui les dejo un video de su funcionamiento, el tanque que compre no realiza todas las funciones, fijense en como se mueve el tanque y la rotacion donde esta hubicado el cañon, pero no al momento de disparar...
Pronto pondre imagenes y videos tomadas por mi sobre el tanque...
jueves, 4 de septiembre de 2008
Microcontroladores

http://www.geocities.com/picmaniaco
De todas maneras si consigo algo mas se los hago llegar por este medio...
Aqui les dejo los datasheets...
DATASHEET PIC16F84
DATASHEET PIC16F877
Motores de PaP O Paso a Paso
- Una parte fija llamada "estator", construida a base de cavidades en las que van depositadas las bobinas que excitadas convenientemente formarán los polos norte-sur de forma que se cree un campo magnético giratorio.
- Una parte móvil, llamada "rotor" construida bien con un imán permanente o bien por un inducido ferromagnético, con el mismo número de pares de polos que el contenido en una sección de la bobina del estator; este conjunto va montado sobre un eje soportado por dos cojinetes que le permiten girar libremente.
En este caso concreto el motor tendrá un paso angular de 90º y un semipaso de 45º
(al excitarse más de una bobina)
| Paso | Terminal 1 Bobina A | Terminal 2 Bobina A | Terminal 1 Bobina B | Terminal 2 Bobina B | Imagen |
| Paso 1 | +Vcc | -Vcc | | |
|
| (Semi) Paso 2 | +Vcc | -Vcc | +Vcc | -Vcc | |
| Paso 3 | | | +Vcc | -Vcc |
|
| (Semi) Paso 4 | -Vcc | +Vcc | +Vcc | -Vcc |
|
| Paso 5 | -Vcc | +Vcc | | |
|
| (Semi) Paso 6 | -Vcc | +Vcc | -Vcc | +Vcc |
|
| Paso 7 | | | -Vcc | +Vcc |
|
| (Semi) Paso 8 | +Vcc | -Vcc | -Vcc | +Vcc |
|








Comportamiento propio de los motores paso a paso:
Los motores paso a paso tienen un comportamiento del todo diferente al de los motores de corriente continua. En primer lugar, no giran libremente por sí mismos. Los motores paso a paso, como lo indica su nombre, avanzan girando por pequeños pasos. También difieren de los motores de CC en la relación entre velocidad y torque (un parámetro que también es llamado "par motor" y "par de giro"). Los motores de CC no son buenos para ofrecer un buen torque a baja velocidad sin la ayuda de un mecanismo de reducción. Los motores paso a paso, en cambio, trabajan de manera opuesta: su mayor capacidad de torque se produce a baja velocidad.
Los motores paso a paso tienen una característica adicional: el torque de detención (que se puede ver mencionado también como "par de detención", e incluso par/torque "de mantenimiento"), que no existe en los motores de CC. El torque de detención hace que un motor paso a paso se mantenga firmemente en su posición cuando no está girando. Esta característica es muy útil cuando el motor deja de moverse y, mientras está detenido, la fuerza de carga permanece aplicada a su eje. Se elimina así la necesidad de un mecanismo de freno.
Si bien es cierto que los motores paso a paso funcionan controlados por un pulso de avance, el control de un motor paso a paso no se realiza aplicando en directo este pulso eléctrico que lo hace avanzar. Estos motores tienen varios bobinados que, para producir el avance de ese paso, deben ser alimentados en una adecuada secuencia. Si se invierte el orden de esta secuencia, se logra que el motor gire en sentido opuesto. Si los pulsos de alimentación no se proveen en el orden correcto, el motor no se moverá apropiadamente. Puede ser que zumbe y no se mueva, o puede ser que gire, pero de una manera tosca e irregular.
Esto significa que hacer girar un motor paso a paso no es tan simple como hacerlo con un motor de corriente continua, al que se le entrega una corriente y listo. Se requiere un circuito de control, que será el responsable de convertir las señales de avance de un paso y sentido de giro en la necesaria secuencia de energización de los bobinados.
Un motor paso a paso se define por estos parámetros básicos:
Voltaje
Los motores paso a paso tienen una tensión eléctrica de trabajo. Este valor viene impreso en su carcasa o por lo menos se especifica en su hoja de datos. Algunas veces puede ser necesario aplicar un voltaje superior para lograr que un determinado motor cumpla con el torque deseado, pero esto producirá un calentamiento excesivo y/o acortará la vida útil del motor.
Resistencia eléctrica
Otra característica de un motor paso a paso es la resistencia de los bobinados. Esta resistencia determinará la corriente que consumirá el motor, y su valor afecta la curva de torque del motor y su velocidad máxima de operación.
Grados por paso
Generalmente, este es el factor más importante al elegir un motor paso a paso para un uso determinado. Este factor define la cantidad de grados que rotará el eje para cada paso completo. Una operación de medio-paso o semi-paso (half step) del motor duplicará la cantidad de pasos por revolución al reducir la cantidad de grados por paso. Cuando el valor de grados por paso no está indicado en el motor, es posible contar a mano la cantidad de pasos por vuelta, haciendo girar el motor y sintiendo por el tacto cada "diente" magnético. Los grados por paso se calculan dividiendo 360 (una vuelta completa) por la cantidad de pasos que se contaron. Las cantidades más comunes de grados por paso son: 0,72°, 1,8°, 3,6°, 7,5°, 15° y hasta 90°. A este valor de grados por paso usualmente se le llama la resolución del motor. En el caso de que un motor no indique los grados por paso en su carcasa, pero sí la cantidad de pasos por revolución, al dividir 360 por ese valor se obtiene la cantidad de grados por paso. Un motor de 200 pasos por vuelta, por ejemplo, tendrá una resolución de 1,8° por paso.
El motor de paso de reluctancia variable (VR): Tiene un rotor multipolar de hierro y un estator devanado laminado, y rota cuando los dientes del rotor son atraídos a los dientes del estator electromagnéticamente energizados. La inercia del rotor de un motor de paso de reluctancia variable es pequeña y la respuesta es muy rápida, pero la inercia permitida de la carga es pequeña. Cuando los devanados no están energizados, el par estático de este tipo de motor es cero. Generalmente, el paso angular de este motor de paso de reluctancia variable es de 15°.
Velocidad de rotación
La velocidad de rotación viene definida por la ecuación:

donde:
- f: frecuencia del tren de impulsos
- n: nº de polos que forman el motor
Si bien hay que decir que para estos motores, la máxima frecuencia admisible suele estar alrededor de los 625 Hz. Si la frecuencia de pulsos es demasiado elevada, el motor puede reaccionar erróneamente en alguna de las siguientes maneras:
- Puede que no realice ningún movimiento en absoluto.
- Puede comenzar a vibrar pero sin llegar a girar.
- Puede girar erráticamente.
- O puede llegar a girar en sentido opuesto.
Para mas informacion ver el siguiente enlace: Motores PaP
lunes, 1 de septiembre de 2008
Interfaz de prueba del Puerto Paralelo
Articulo escrito por Virgilio Gómez Negrete
Actualmente, la mayoría de los puertos instalados en las computadoras son de tipo multimodal configurables a través del BIOS de la máquina, en éste artículo me refiero expresamente al modo Normal (SPP), además de éste están las opciones Bidireccional, EPP versión 1.7, EPP versión 1.9 y ECP principalmente. El modo de operación Normal es el más elemental y solamente permite la escritura en las líneas de datos, patitas 2 a la 9 del conector DB-25 del puerto paralelo de la PC.
Eléctricamente, el puerto paralelo entrega señales TTL y como tal, teoricamente, se le puede conectar cualquier dispositivo que cumpla con los niveles de voltaje específicos de la lógica TTL, sin embargo el hardware del puerto paralelo está muy limitado en cuanto a su capacidad de manejo de corriente, por ésta razón se debe ser muy cuidadoso con el manejo de las señales del puerto, un corto circuito puede dañar permanentemente la tarjeta madre de la PC. Para disminuir lo más posible el riesgo de daños al puerto utilizamos un circuito integrado 74LS244 como etapa separadora y al mismo tiempo mejoramos la capacidad de manejo de corriente, de esta forma podemos conectar una serie de diodos emisores de luz (LED) que nos indiquen la actividad en las líneas de datos del puerto paralelo. El circuito se detalla en el siguiente diagrama:

Por cada línea de entrada que tomamos directamente del puerto paralelo existe una etapa amplificadora-separadora dentro del circuito integrado 74LS244 que nos permite trabajar con una tasa de entrega de corriente suficiente para desplegar en los diodos emisores de luz la información escrita en las líneas de datos del puerto. Además es posible habilitar ó deshabilitar el despliegue del nibble de orden inferior ó superior del byte escrito en el puerto. Colocando en un nivel lógico alto la patita 1 del CI 74LS244 inhabilitamos el despliegue del nibble de orden bajo, un nivel lógico alto en la patita 19 evita el despliegue del nibble de orden alto. Para comodidad, conecto las patitas 1 y 19 permanentemente a tierra de tal manera que sea posible visualizar la actividad en los diodos emisores de luz (LED). En el diagrama se especifican con números las correspondientes patitas del conector DB-25. Obviamente se requiere de una fuente regulada de 5 Voltios para operar éste circuito, además los siguientes materiales:
- 1. Circuito Integrado TTL 74LS244.
- 8. Diodos Emisores de Luz.
- 8. Resistencias de 220 Ohms, 1/2 Watt.
- 1. Cable y conector para el puerto paralelo.
Naturalmente lo más recomendable es probar el correcto funcionamiento del circuito antes de conectarlo al puerto paralelo de la PC. Ensamble el circuito, preferentemente en un circuito impreso, y conéctelo a una fuente regulada de 5 Voltios, conecte temporalmente un extremo de una resistencia de 10,000 Ohms a una línea de entrada, el resto de las líneas de entrada conéctelas a tierra. El otro extremo de la resistencia conéctelo directamente al borne positivo de la fuente de alimentación para inducir una señal TTL alta, el respectivo LED debe encender. Con un trozo de alambre conectado a Tierra, toque temporalemente el extremo de la resistencia que está conectado a la línea de entrada para inducir una señal TTL de lógica baja, el LED se debe apagar. Repita ésta operación para cada una de las ocho líneas de entrada. Una vez que ha verificado el correcto funcionamiento del circuito está listo para conectarlo al puerto paralelo de la PC.
En primer lugar apague la computadora y el circuito. Conecte el cable al puerto paralelo asegurándose que el conector esté firme en su sitio. Encienda el circuito y por último encienda la computadora, por regla general, el circuito de restablecimiento de la computadora coloca inicialmente en las líneas de datos del puerto paralelo un valor igual a 0x0h, por lo tanto todos los diodos deben estar apagados una vez que la computadora ha terminado su proceso de arranque, sin embargo, si algún diodo permanece encendido ésto no indica una condición de falla, es responsabilidad del software que Usted escriba para controlar el puerto inicializarlo con un valor adecuado antes de realizar cualquier otra operación.
Mas informacion en la pagina del autor
Conociendo el Puerto Paralelo de la PC Conector DB-25

El puerto paralelo de una típica PC utiliza un conector hembra de tipo D de 25 patitas (DB-25 S), éste es el caso más común, sin embargo es conveniente mencionar los tres tipos de conectores definidos por el estándar IEEE 1284, el primero, llamado 1284 tipo A es un conector hembra de 25 patitas de tipo D, es decir, el que mencionamos al principio. El orden de las patitas del conector es éste:

Desde el punto de vista del software, el puerto paralelo son tres registros de 8 bits cada uno, ocupando tres direcciones de I/O consecutivas de la arquitectura x86. Desde el punto de vista hardware, el puerto es un conector hembra DB25 con doce salidas latcheadas (que tienen memoria/buffer intermedio) y cinco entradas, con 8 líneas de masa. La función normal es transferir datos a una impresora a través de las 8 líneas de datos, usando las señales restantes como control de flujo.


- 4 Puerto de control
- 5 Puerto de estado
- 8 Puerto de datos

En el diseño original el puerto de control son usadas para la interfase, control e intercambio de mensajes desde el PC a la impresora.
domingo, 31 de agosto de 2008
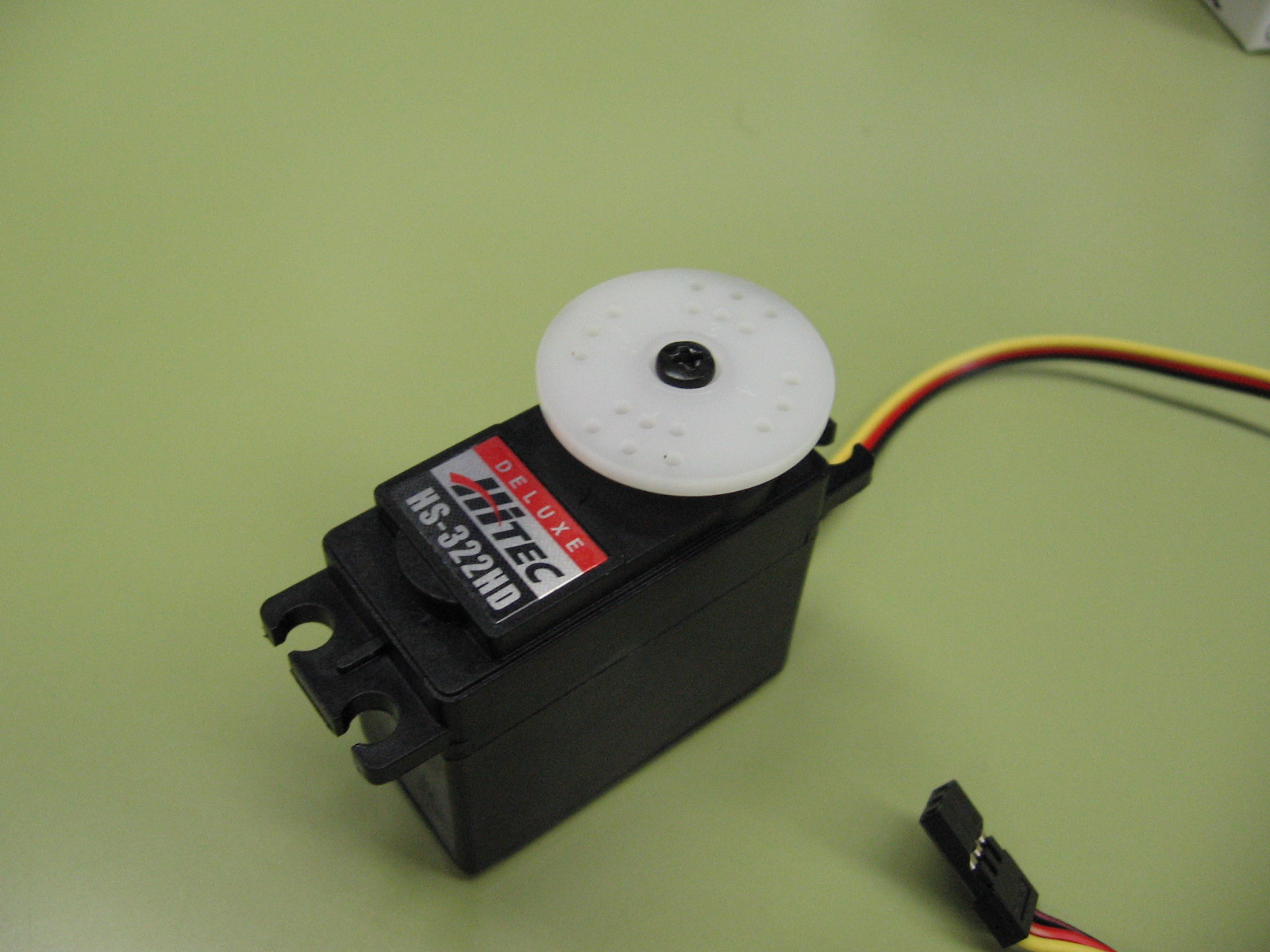
Modificacion de un Servomotor

Tarde o temprano, todo aficionado a la robótica decide utilizar un servo como si fuese un motor dotado de una caja reductora. Esto es muy sencillo de lograr, aunque requiere tener bastante cuidado para no terminar con un servo inutilizado.
Para los que no saben de que hablamos, la idea es quitar las restricciones mecánicas y electrónicas que posee un servomotor para permitirle girar libremente, aunque conservando la posibilidad de ser comandado desde un microcontrolador.
Para que todos los lectores de uControl puedan llevar a buen puerto el "trucado" de sus servos, hemos escrito esta guía paso a paso, con muchas fotografías para ilustrar cada etapa del proceso.
pronto pasare la tutorial al blog para asi facilitarles el trabajo...
Servomotores
En wikipedia podemos encontrar la definicion de un servomotor, pero de todas maneras aqui les hablare un poco sobre el servomotor...
Servo analógico para modalismo
Estos servomotores se componen, en esencia, de un motor de corriente continua, un juego de engranajes para la reducción de velocidad, un potenciómetro ubicado sobre el eje de salida (que se usa para conocer la posición) y una plaqueta de circuito para el control.
 Despiese de un servomotor
Despiese de un servomotorLos servos que se usan en modelismo son de este tipo. Como se dijo anteriormente, por lo general poseen un motor de CC, que gira a velocidad alta, una serie de engranajes para producir la reducción de velocidad de giro y acrecentar su capacidad de torque, un potenciómetro conectado al eje de salida (que es ni más ni menos que el encoder) y un circuito de control de la realimentación.
Estos servos reciben señal por tres cables: alimentación para el motor y la pequeña plaqueta de circuito del control (a través de dos cables, positivo y negativo/masa), y una señal controladora que determina la posición que se requiere. La alimentación de estos servos es, normalmente, de entre 4,8 y 6 voltios.
El estándar de esta señal controladora para todos los servos de este tipo, elegido para facilitar el uso en radiocontrol, es un pulso de onda cuadrada de 1,5 milisegudos que se repite a un ritmo de entre 10 a 22 ms. Mientras el pulso se mantenga en ese ancho, el servo se ubicará en la posición central de su recorrido. Si el ancho de pulso disminuye, el servo se mueve de manera proporcional hacia un lado. Si el ancho de pulso aumenta, el servo gira hacia el otro lado. Generalmente el rango de giro de un servo de éstos cubre entre 90° y 180° de la circunferencia total, o un poco más, según la marca y modelo.
Es posible modificar un servo motor para eliminar su restricción de giro y permitirle dar giros completos. Esto, sin embargo, convierte al servo motor en un motor de corriente continua normal, pues es necesario eliminar el circuito de control. Debido que los engranajes reductores se conservan luego de la modificación, el motor obtenido mantiene la fuerza y velocidad que tenían servo inicial. Además, poseen la ventaja de que tienen menos inercia que los motores de corriente continua comerciales, lo que los hace útiles para ciertas aplicaciones.
Puente H
Puente H
por Eduardo J. Carletti
de la pagina http://robots-argentina.com.ar
En el circuito de abajo vemos un Puente H de transistores, nombre que surge, obviamente, de la posición de los transistores, en una distribución que recuerda la letra H. Esta configuración es una de las más utilizadas en el control de motores de CC, cuando es necesario que se pueda invertir el sentido de giro del motor.

Aplicando una señal positiva en la entrada marcada AVANCE se hace conducir al transistor Q1. La corriente de Q1 circula por las bases, de Q2 y Q5,haciendo que el terminal a del motor reciba un positivo y el terminal b el negativo (tierra).


Una de las cosas muy importantes que se deben tener en cuenta en el control de este circuito es que las señales AVANCE y RETROCESO jamás deben coincidir. Si esto ocurre los transistores, Q2, Q3, Q4 y Q5 cerrarán circuito directamente entre el positivo de la fuente de alimentacion y tierra, sin pasar por el motor, de modo que es seguro que se excederá la capacidad de corriente Emisor-Colector y los transistores, se dañarán para siempre. Y si la fuente no posee protección, también podrá sufrir importantes daños. Al efecto existen varias formas de asegurarse de esto, utilizando circuitos que impiden esta situación (llamados "de interlock"), generalmente digitales, basados en compuertas lógicas. Abajo mostramos un ejemplo.


Existe una solución menos mecánica y más electrónica, que es, en lugar de aplicar una corriente continua, producir un corte de la señal en pulsos, a los que se les regula el ancho. Este sistema se llama control por Regulación de Ancho de Pulso (PWM, Pulse-Width-Modulated, en inglés).
Solo colocare en este blog la info que necesitare y usare para armar este robot, si quieren complementar usen los links de intereses que les deje y google XD...




{kind=link}